工程师接受在线咨询

与之校准

通过 Edmund Optics®, 相机镜头组配合PixelTraq标定服务升级您的成像系统——整套设备预先装配、调焦并完成精密标定;了解它如何提升您的应用性能。
专用定制解决方案根据您的需求配置视场角、工作距离、波长等参数
最优化精度优化标定特征分布,实现卓越的相机特性分析并满足特定应用性能需求
广泛适用性支持适配 Edmund Optics® 产品目录中的各类相机镜头及常见/定制相机型号。
所有成像系统在再现真实世界时都存在固有误差。所有成像系统在呈现真实世界时都存在固有误差。这些误差可能源自机械结构的公差、传感器对准偏差以及光学像差,最终会导致图像中捕获的信息排列出现不准确。这种不准确性通常被称为"畸变"。这种不准确性通常被称为 畸变.相机标定是一个确定复杂投影函数的过程,该函数表征了图像畸变特性,从而可将其消除。虽然该技术主要应用于需要精确几何与深度测量的场景,但对于追求无畸变图像的用户同样有益。Edmund Optics® 与Quartus Engineering合作提供相机标定服务,结合Edmund Optics®丰富的相机及镜头产品库与Quartus的专利标定技术PixelTraq。这一创新架构实现了标定流程的全自动化,并采用先进的优化模型,确保成像系统针对特定应用完成精准标定。
目前,我们的标定服务仅适用于TECHSPEC®定焦镜头及兼容相机,因为这些设备可以牢固固定且无需移动对焦。现阶段,我们不提供S型接口配置的标定服务。在相关产品页面上,您会看到"标定服务"选项卡,点击后将跳转至我们的 PixelTraq 相机标定服务报价工具,您可在该工具中选择相机、镜头、照明颜色、所需相机型号、工作距离和f/#值。表格填写完成后,我们的机器视觉销售工程师团队将收到通知,并会尽快与您联系,进一步讨论您的应用需求。您能向我们工程师团队提供的应用需求信息越详细,我们就能更好地为您提供合适的标定参数设置。
| 服务类型 | 参数规格 | 范围/ 选项 |
|---|---|---|
| Base | ||
| 工作距离 | 0.1 - 4.0 米(如需更远工作距离,可应要求提供) | |
| F/# | 取决于所选硬件 | |
| 标定颜色 | 红色、绿色、蓝色或白色* | |
| 相机型号 | Brown Conrady、Kannala(径向/完整) | |
| 可选 | ||
| 对焦MTF的视场角 | 取决于所选硬件及客户需求 | |
| 空间频率 | 取决于所选硬件及客户需求 |
* 光谱数据可应要求提供
请注意需要标定服务,需额外增加约 10 天 的交货周期。
您的订单将包含:按选定焦距固定组装的成像系统、标定证书(关键调节点采用环氧树脂固定,防止偏移)所有标定文件均安全存储在 Quartus 服务器,可通过证书或硬件上的 QR 码 便捷访问。标定证书包含详细的内部参数和外部参数信息、畸变偏差百分比图表、角度误差和表面误差值——这些都能提高您系统的精度。要充分利用这些标定数据,Quartus 提供了一个 API,您可以将其集成到您的应用程序中,或作为自定义代码的起点。有关相机标定的更多信息以及如何应用您的标定模型,可通过标定证书底部的 QR 码链接访问,或通过 Quartus 资源库获取。
高精度成像系统需要根据您的应用需求定期重新标定。对于易受环境变化、机器振动和高频率使用影响的应用,最好定期评估机器性能,并在精度下降时重新标定。作为一般准则,许多成像系统建议每六个月至一年重新标定一次。
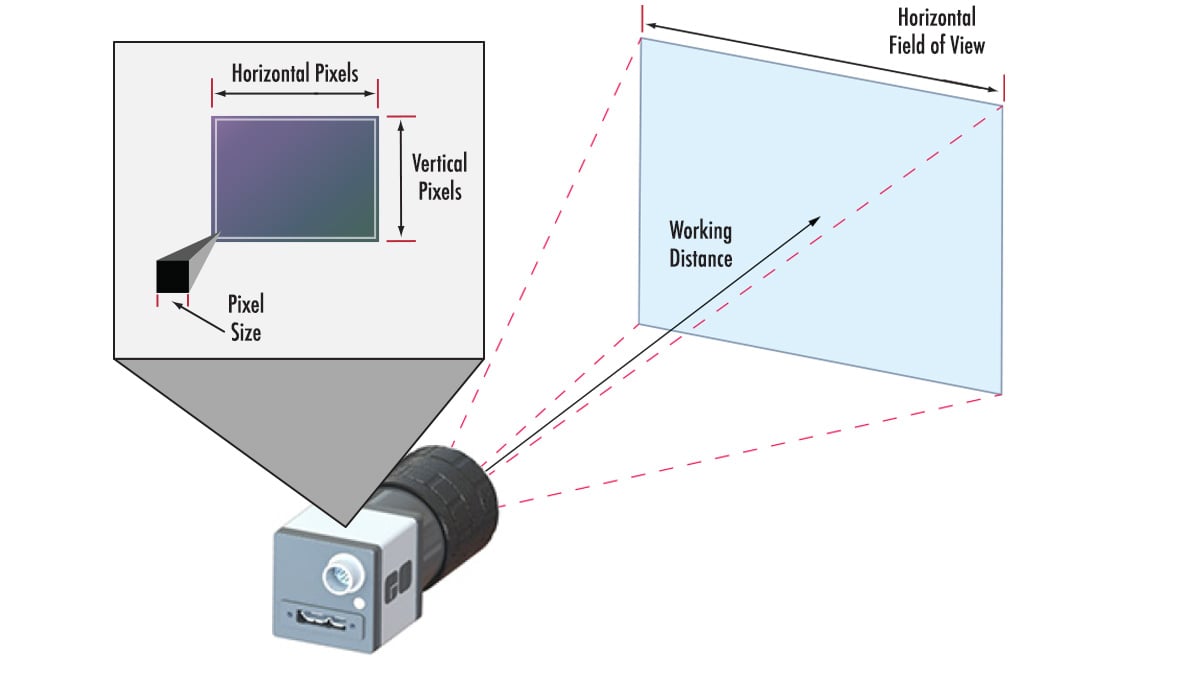
成像系统具有内参和外参因素,这些因素共同提供了关于图像如何形成的重要信息。内参告诉我们光线如何通过成像镜头折射并投射到传感器上。相比之下,外参告诉我们成像系统在物理世界中的方向和位置。最终,标定是一个推导数学模型的过程,该模型将来自3D真实场景的光线追踪到传感器上像素阵列的2D映射。PixelTraq标定流程使我们能够测量系统的内参,并消除由镜头折射引起的误差。这种标定方法特别适用于以下应用:三维检测、自主机器人和医疗成像,这些应用需要精确的深度感知和空间频率表征。
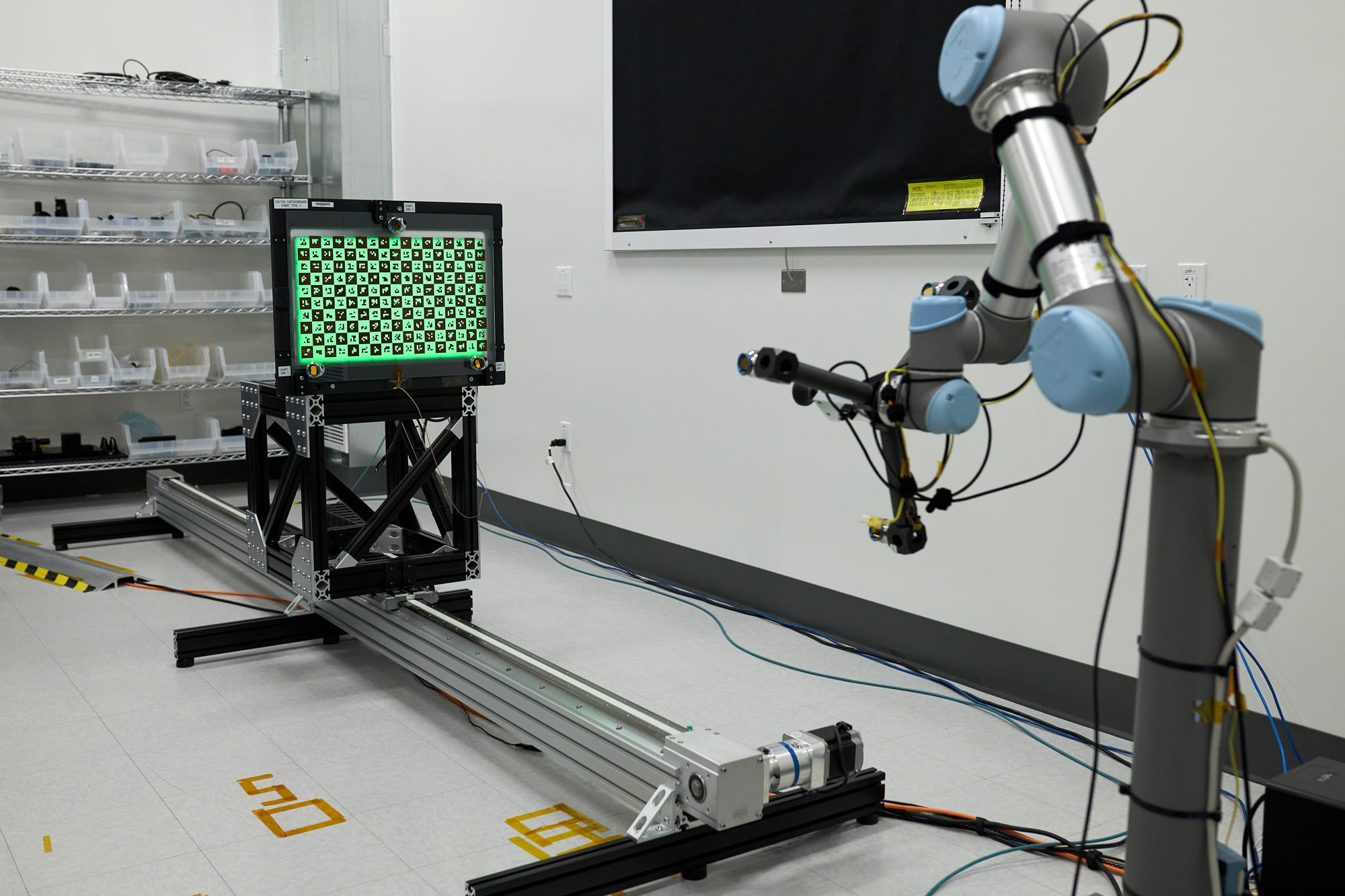
客户常会尝试使用打印的棋盘格标靶和开源训练模型进行自主标定。该过程需要将相机固定于特定位置,然后在完整视场范围内拍摄标靶图像,并确保图像中的标靶特征具有足够重叠区域。当获得足够的特征重叠以构建视场(FOV)内的点云后,即可开始标定流程。需注意:标定模型的精度本质上受限于所用数据的质量;若未使用可溯源的校准标靶,误差概率将显著增加。关于开源方法与PixelTraq差异的更多细节,请参阅 相机标定入门指南 白皮书。PixelTraq通过专用测试台实现全自动标定流程,可在数分钟内采集数千个数据点。这些数据随后由优化算法进行分析,以确定符合您特定需求的最佳相机模型和点密度。此外,PixelTraq会评估训练模型中的重投影误差,从而确定最适合您应用的解决方案。

通过我们的合作伙伴Quartus Engineering提供的白皮书,了解更多关于相机校准及其应用的详细信息。
相机校准入门指南
了解为什么您的应用可能需要相机校准,以及基于PixelTraq的方法如何改进您当前的流程。
相机模型入门
相机模型是光线从现实世界传播到相机成像平面的数学表示。了解更多关于相机校准过程中使用的不同类型相机模型。
理解您的校准结果
学习如何分析和解读您的PixelTraq校准认证。
要查看所有PixelTraq白皮书,请访问 Quartus的 PixelTraq 资源页面














或查看各区域电话
报价工具
只需输入商品编号
Copyright 2025, 爱特蒙特光学(深圳)有限公司 粤ICP备2021068591号
The FUTURE Depends On Optics®