












畸变
作者: Gregory Hollows, Nicholas James
成像资源指南4.5章节
“失真”一词经常与图像品质下降互换使用。失真是不会从技术上减少图像中信息的个别像差;而大多数像差实际上会将信息混在一起,造成图像模糊,失真只是以几何方式让信息错位。这意味着,失真实际上可以从图像计算或映射,然而,来自其他像差的信息实际上已在图像中丟失并且无法轻松重建。请注意,在失真度极高的环境中,某些信息与细节可能因分辨率随放大倍率而变化或因太多信息挤在单一像素上而丟失。
失真是一种单色光学像差,描述了在固定工作距离下,图像中放大倍率在视场范围内的变化情況;这在精密仪器视觉与计量应用中极其重要。失真不同于视差,视差是指随着工作距离而发生的放大倍率(视场)变化(有关视差的更多信息,请详见远心度优点中有关远心度的內容)。务必记住,失真随波长而变化,如图1中所示。当从机器视觉系统校准失真时,需要考虑照明的波长。如图1中的曲线对決定如何校准失真非常有帮助。
与其他像差一样,失真是由镜头的光学设计决定的。具有较大视场的镜头,一般会因其依赖于立方体视场而展示出更大的失真。失真是第三阶像差,对于简单的镜头,它会随着场高的三次幂而增大;这意味着,较大的视场(由低放大倍率或短焦距产生)比较小的视场(由高放大倍率或长焦距产生)更容易出現失真。应该在短焦距镜头实现的宽视场与系统中引入的像差(例如失真)之间权衡利弊。另一方面,远心镜头通常具有极低的失真:这是由它们的工作原理决定的。还必须注意,在设计具备最低失真的镜头时,可以减小可实现的最大分辨率。为了将失真降至最低,同时保持高分辨率,应该在设计中加入元素或利用更复杂的光学玻璃,系统的复杂度一定会有所增大。

图 1: 显示失真随波长变化的失真图。
如何指定失真?
失真通常以场高百分比的形式指定。通常,如果不使用测量算法,则不会注意到视觉系统中±2到3%的失真。在简单镜头中,主要有两种失真:正、桶形失真,其中视场中的点显示得太靠近中心;以及负、枕形失真,其中点离中心太远。桶形和枕形是指在出现两种失真时,矩形场会形成的形状,如图2中所示。

图 2: 正负失真图解。
要计算失真,只需使用方程式1将图像的实际距离(AD)与预计距离(PD)关联。这可以通过使用点目标等图案来实现,如图3中所示。Choosing the Correct Test Target提供了有关失真目标的更多信息。
图 3: 校准目标(红圈)与成像点(黑点)失真图案。
务必注意,虽然镜头中失真的趋势一般非负即正,但对于多元素集合,失真在图像内不一定表现为线性。此外,随着波长改变,失真度也会发生变化。最后,失真可随着工作距离改变而变化。最终,务必单独考虑用于特定应用的每个镜头,以便在努力消除系统失真时保证最高级别的准确度。
失真曲线示例
图4显示了35mm镜头系统中的负或桶形失真。在此特定示例中,所分析的所有波长都具有几乎一致的失真度,因此不存在与波长有关的问题。在图5中,可以看到一组有趣的失真特征:首先,不同波长的失真度都是分离的;第二,此镜头中存在负失真和正失真。此性质的失真是指波形失真或胡子失真。这种失真常见于专为实现非常低的失真而设计的镜头,例如那些为测量和计量应用而设计的镜头。在这种情况下,校准系统以消除失真可能需要特别考虑使用不同波长的应用。

图 4: 镜头中的负或桶形失真。

图 5: 镜头中的波形或胡子失真。
几何失真与TV失真:重要差别
在镜头数据表中,失真通常被指定为下列两种之一:径向、几何失真或RIAA TV失真。几何失真描述了失真图像中点显示位置与它们在完美系统中所处位置之间的距离。实际上,这可使用失真点目标来测量。从目标中心到视场中任意点之间的距离,与从图像中心到现已错位的相同点(如图3中所示)之间距离的差別,用于通过方程式1来计算径向失真百分比。
TV失真的测量由RIAA成像标准指定,并通过对填充垂直视场的方形目标进行成像来確定。方形边角和中心边缘之间的高度差別用于通过方程式2来计算TV失真;这描述了图像边缘显示的线条的明显直线度,实际上为单一视场点的几何失真。仅指定视场中一个点的失真,可能会将非零失真镜头曲解为具有0%失真。在图5中,对于显示的任何波长,都可以找到0%的截波。但考虑完整像圈后,很显然,镜头具有非零失真。图6中显示了如何寻找TV失真的示例。
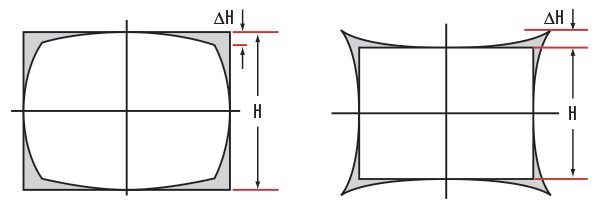
图 6: 带桶形失真及枕形失真的TV失真。
如图5所示,在现实世界中,复合成像镜头组件失真不一定是单向的,并且可在视场内更改信号,这就是径向失真图比单一RIAA值更可取的原因所在。鉴于其指定方式,TV失真值可能比相同镜头的最大几何失真值要低得多,因此,必需了解在为应用选择最适合的镜头时应该指定什么类型的失真。
梯形失真
除了前面所提及的镜头光学设计所固有的失真类型外,不适当的系统调整也可导致梯形失真,这表示存在视差(如图7a与7b所示)。

图 7: 梯形失真的示例。
根据失真校准成像系统时,除了径向几何失真外,还应考虑梯形失真。尽管失真通常被视为修饰像差,但在选择适当的镜头时,应该对照其他系统规格来仔细考虑。除了丢失图像信息的可能外,算法失真校正还会花费额外的处理时间和力气,这在高速或嵌入式应用中可能是无法接受的。












或查看各区域电话
报价工具
只需输入商品编号
Copyright 2025, 爱特蒙特光学(深圳)有限公司 粤ICP备2021068591号
The FUTURE Depends On Optics®