工程师接受在线咨询

|
|
捕捉拐角处和障碍物后面物体的图像 |
|
|
从隐藏目标射出的散射光用于重建目标的三维模型 |
|
|
包括将周围物体射出的激光散射到隐藏目标上 |
|
|
自动驾驶汽车、公共卫生和医学成像有许多潜在的好处 |
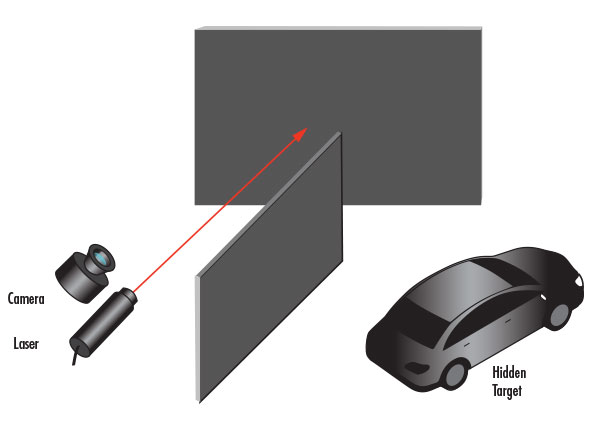
在每一种成像应用中,通常都需要物体和照相机或探测器之间的直接视线,除非出现极端情况,例如天文学中由于引力透镜效应导致的光弯曲。但在大多数情况下,成像应用仅限于光的直线传播。不过,随着一些前沿研究为拐角处和障碍物周围的物体成像开辟可能性,这种情况正在开始改变。结合激光、敏感相机和计算重建方法,可以通过散射周围物体发射的光来探测被障碍物遮挡的物体。
视线外成像的过程类似于激光雷达(光探测和测距),激光脉冲被发送到一个物体,物体发出的光散射的飞行时间用来测量物体和探测器之间的距离。不过,通过为这一过程添加另一个散射事件,视线外成像图像的物体会被障碍物遮挡。1
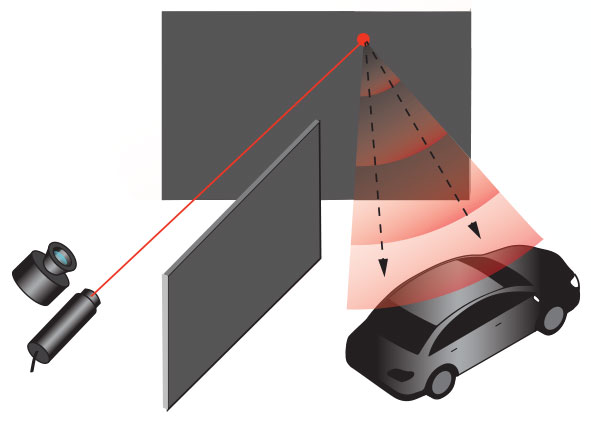
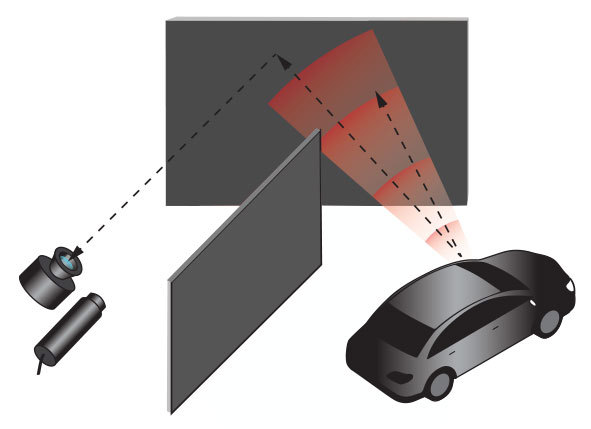
为了实时测量皮秒和飞秒脉冲光的传播,需要单光子雪崩光电二极管阵列等高灵敏度相机。探测器接收到两种不同的返回信号:一种是直接散射到墙外的初始光信号,另一种是散射到目标外的二次光信号,用于视线外成像。然后,利用这些飞行时间信息重建一系列椭球体,所有椭球体都在隐藏目标上的给定点上重叠,从而使计算软件能够计算相机与隐藏目标之间的距离,并重建目标的三维模型。
一个三维物体可以分解成多个散射光的点的集合。所有这些点合在一起可以重建原始对象的模型。如果探测器能够分辨出时间分辨率为 100ps 的返回脉冲,则对应于隐藏目标上点的空间分辨率 1.5cm。 1
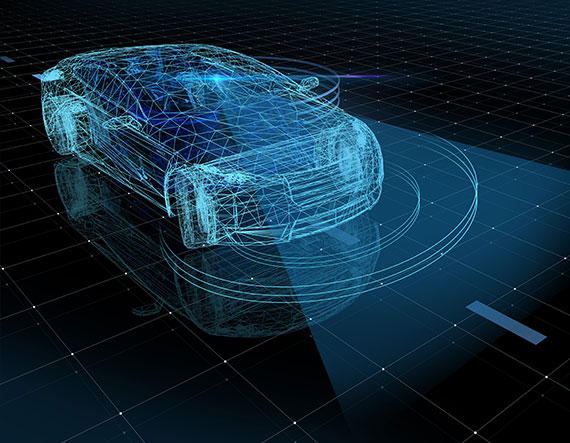
让汽车在附近的车辆靠近或拐角处的行人进入视线之前就感应到他们2

让执法人员、消防队员和紧急医疗服务人员在安全距离检测到处于危险境地的人员2
研究隐藏在系统视线之外的小型三维结构2
采用这一新兴技术,并为现实世界的使用创建一个可移植的、对观察者的眼睛没有危险的实用解决方案具有极大的挑战性。视线外成像的主要问题之一是返回探测器的光线量有限,探测器必须能够接收到这一极其少量的光线,并将其与任何环境光源区分开来。返回探测器的信号是两个连续散射的结果,会导致极高的损耗。返回信号可以低到每个激光脉冲一个光子。1
不过,斯坦福计算机成像实验室已经开发出一种视线外成像系统,可以在室外间接阳光下工作。他们成功拍摄了一个由反光带制成且被墙壁遮挡的物体,这对这项技术的未来来说是个好兆头。.
中佛罗里达大学的 Aristide Dogariu 实验室正在研究利用到达墙壁的光线的空间相干性,而不是从墙壁及其后面的目标散射的激光的视线外成像。3 这可以在不需要超快激光照明的情况下对隐藏目标进行建模,使该技术在现实世界中的应用更加便携和易于使用。
在视线外成像技术可用于实际的商业系统之前,还需要进行更多开发,但它是适合下一代成像应用的一个极有前途的解决方案。
参考1. Faccio, Daniele. “Non-Line-of-Sight Imaging.” Optics and Photonics News, vol. 30, no. 1, Jan. 2019, pp. 36–43.
2. M. O’Toole, D.B. Lindell, G. Wetzstein, “Confocal Non-Line-of-Sight Imaging Based on the Light-Cone Transform”, Nature, 2018.
3. Batarseh, M., et al. “Passive Sensing around the Corner Using Spatial Coherence.” Nature Communications, vol. 9, no. 1, 2018, doi:10.1038/s41467-018-05985-w.
 最初从墙壁上散射出去的激光难道不会超过从隐藏目标上散射出去的二次散射吗?
最初从墙壁上散射出去的激光难道不会超过从隐藏目标上散射出去的二次散射吗?
直接从墙外散射的光比间接物体的二次散射强得多,但是它们之间有一个时间延迟,这使得时间分辨率足够高的高灵敏度探测器能够区分这两个信号。2
一旦捕获到隐藏目标二次散射的时间延迟,计算重建软件如何重建目标的三维模型?
该软件首先将所有测量数据存储在三维时空体中。然后,它沿时间轴对测量值进行重采样,使用反向滤光片在频域进行卷积,再沿深度轴对结果进行重采样,以还原隐藏对象。2


















或查看各区域电话
报价工具
只需输入商品编号
Copyright 2023, 爱特蒙特光学(深圳)有限公司。— 广东省深圳市龙华工业东路利金城科技工业园3栋5楼 518109 - 粤ICP备2021068591号